詳解 Linux カーネル輪読会 第7章

Naotoshi Seo
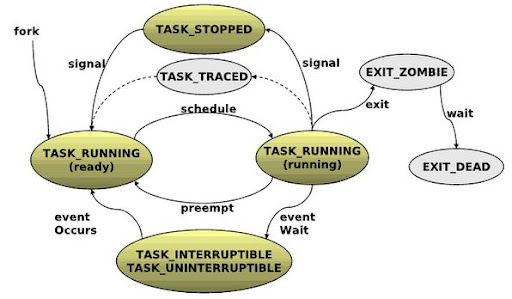
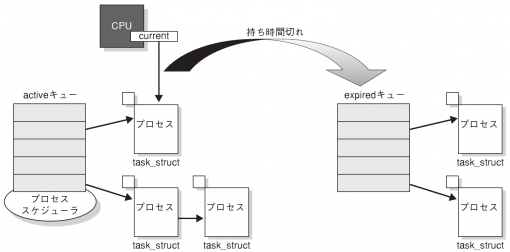
いつどのようにプロセスを切り替えるのか
求めるもの
Linux のスケジューリング: 時分割(タイムシェアリング)
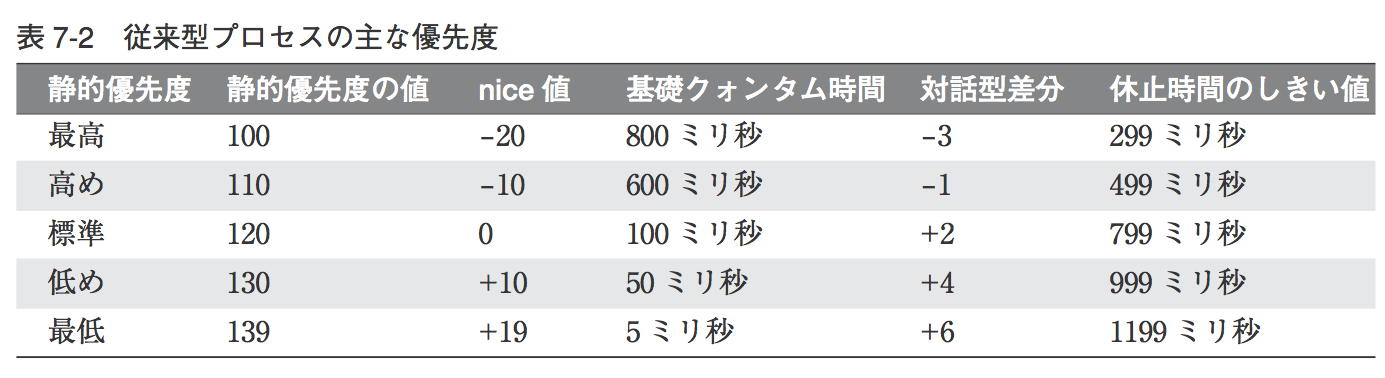
優先度に基づいたスケジューリング
スケジューリングにおけるプロセスの分類その1
スケジューリングにおけるプロセスの分類その2
スケジューリングにおけるプロセスの分類その2
用例

リアルタイム
SCHED_OTHER

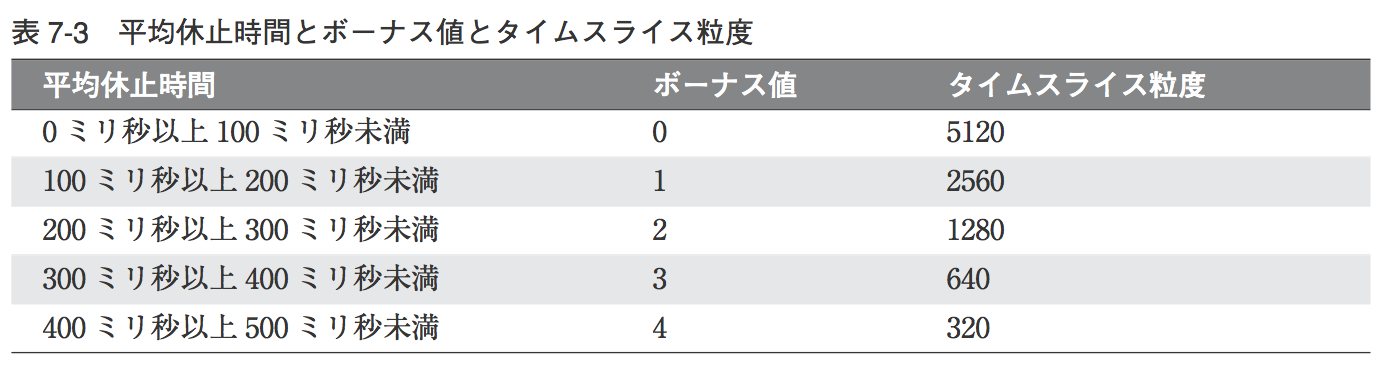
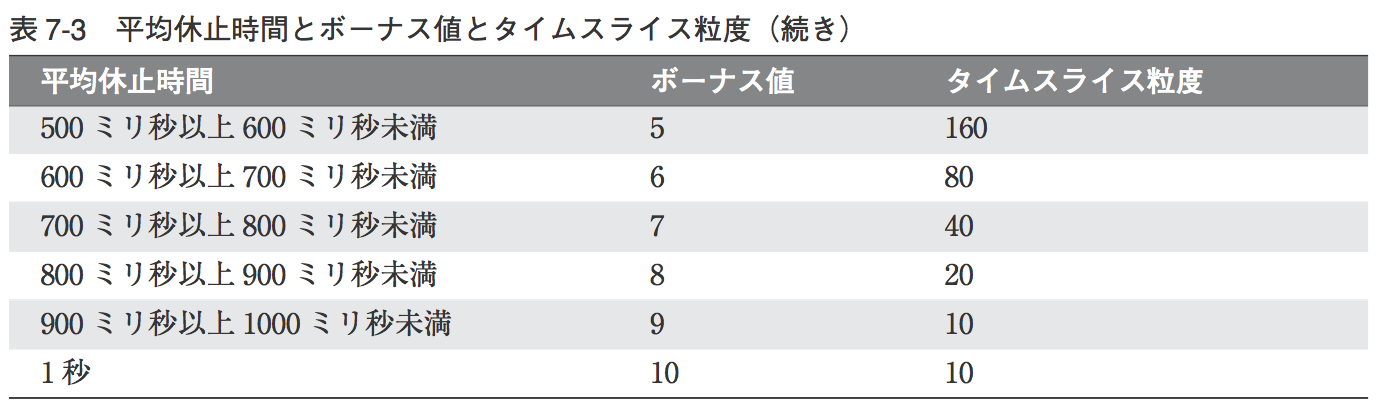
動的優先度 = max ( 100, min (静的優先度 - ボーナス + 5, 139 ) )
平均休止時間とボーナス値の関係式。タイムスライス粒度はあとで
動的優先度 <= 3 x 静的優先度 / 4 + 28
または(上下は同等な式)
ボーナス値 - 5 >= 静的優先度 / 4 - 28
Go to p284
Go to p285
cf. http://www.logos.ic.i.u-tokyo.ac.jp/~kenny/presentation/linux_sched26.ppt
7.4.1.1 リアルタイムプロセスのタイムスライスの更新
cf. http://www.logos.ic.i.u-tokyo.ac.jp/~kenny/presentation/linux_sched26.ppt
時間ないし、詳細すぎるし、飛ばします(´・ω・`)
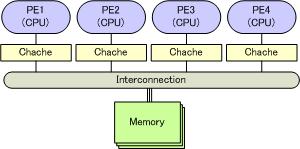
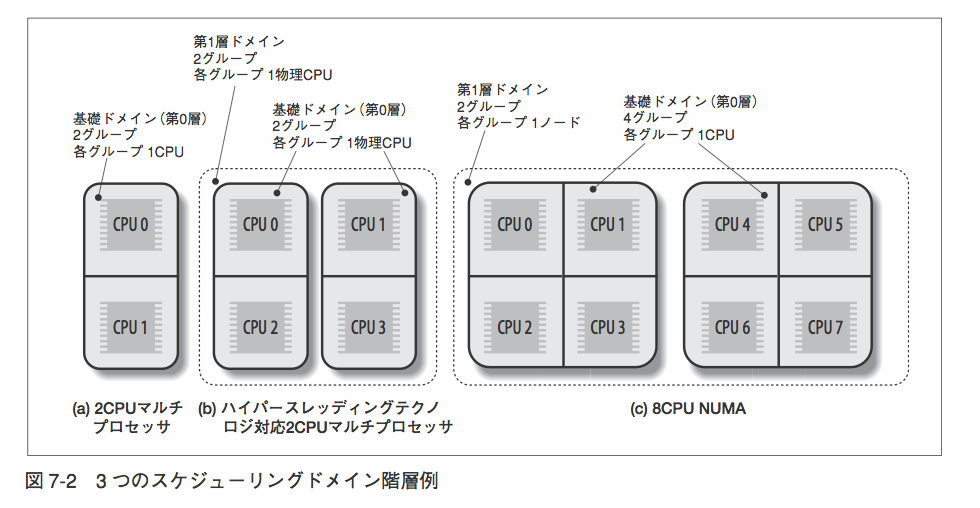
ハイパースレッディング
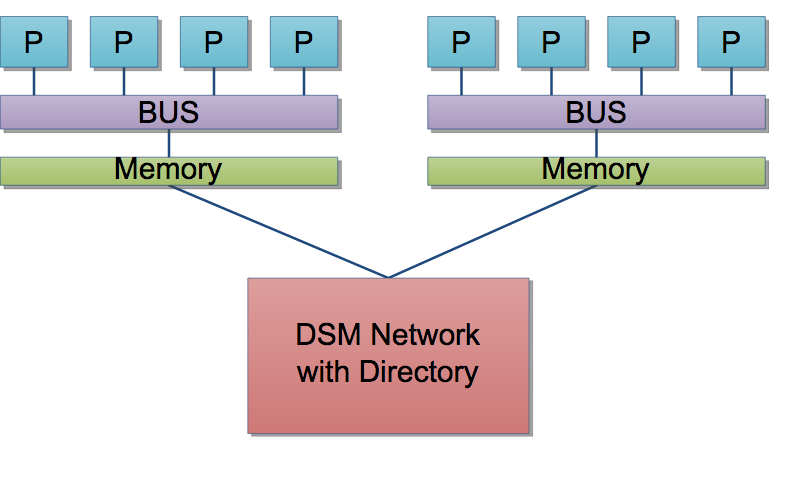
NUMA
nice -n -20 find /
top # NI が nice で PR が動的優先度
taskset 0x00000001 pid
おまけで紹介したコマンド